
1. Coastal acoustic tomography(CAT)
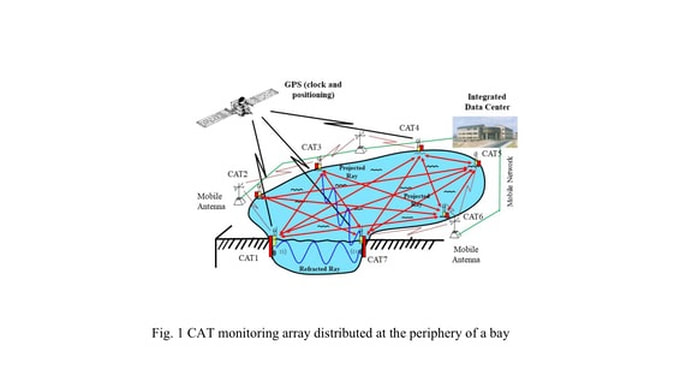
In a CAT experiment, observation regions are surrounded by multi acoustic stations and reciprocal sound transmissions are performed between all station pairs. Range-average current and sound speeds (mainly proportional to temperature) are calculated from the travel time difference and travel time summations, respectively, obtained along all the transmission paths. Accurate clocks and accurate positioning are required to obtain precise range-average currents and sound speeds, respectively. Precise clock accuracy is accomplished by GPS clock signals. However, GPS positioning insufficient for temperature measurement requires a position correction which uses the CAT travel time and CTD sound speed observed on a transmission path. Current velocity and temperature fields in a horizontal slice are reconstructed by inverse analysis which uses travel time differences and travel time summations, respectively, obtained along the transmission paths. The distribution of current velocity and temperature in a vertical slice is reconstructed by inverse analysis which uses travel time data, obtained along the refracted rays passing different depths. The 3D structures of current velocities and temperatures are reconstructed using the results from both horizontal and vertical slice inversions.
In a CAT experiment, observation regions are surrounded by multi acoustic stations and reciprocal sound transmissions are performed between all station pairs. Range-average current and sound speeds (mainly proportional to temperature) are calculated from the travel time difference and travel time summations, respectively, obtained along all the transmission paths. Accurate clocks and accurate positioning are required to obtain precise range-average currents and sound speeds, respectively. Precise clock accuracy is accomplished by GPS clock signals. However, GPS positioning insufficient for temperature measurement requires a position correction which uses the CAT travel time and CTD sound speed observed on a transmission path. Current velocity and temperature fields in a horizontal slice are reconstructed by inverse analysis which uses travel time differences and travel time summations, respectively, obtained along the transmission paths. The distribution of current velocity and temperature in a vertical slice is reconstructed by inverse analysis which uses travel time data, obtained along the refracted rays passing different depths. The 3D structures of current velocities and temperatures are reconstructed using the results from both horizontal and vertical slice inversions.
2. Advancement to mirror-type coastal acoustic tomography (MCAT)
In CAT subsurface systems operation, travel-time data are generally stored in individual subsurface stations, and data analyses are performed after the recovery of subsurface systems. Such a delayed data acquisition is insufficient to realize the daily prediction of coastal environment variations. The shoreward transfer of subsurface CAT data enables a monitoring of offshore environments from the shore and make a real-time prediction of offshore environmental changes possible, similarly to radar data in the daily weather prediction.
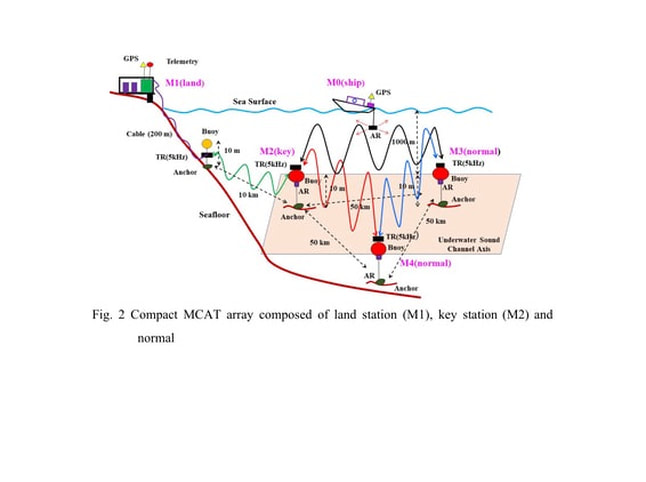
An outline of CAT with mirror-transpond functionality (MCAT) is given here to stimulate a better understanding for marine policy makers, marine engineers and environmentalists who are interested in the conservation and management of coastal environments. A minimum component of MCAT is a reciprocal sound transmission between one land station (M1) and one offshore station (M2). Original sound transmission and reception are performed between M1 and M2 to construct a pair of reciprocal travel times (t12, t21), for which the travel time difference and travel time summation are proportional to range-average current and sound speed (mainly temperature), respectively. However, t12 is the data obtained at the offshore station M2 and then, cannot be used as real time data. Note that in the subscripts for the travel times, the first and second numbers show the number of the transmit and reception stations, respectively. The original data are stored in the mirror recorder of the MCAT system and the mirror-recorded data are used to execute a subsequent mirror transmission. Two-way non‑separable travel times [t12+t21] and [t21+t12] are constructed by a sequence of original-mirror transmissions, M1🡪M2🡪M1 and M2🡪M1🡪M2, respectively. As a result, t21 and [t12+t21] are obtained at land station M1, and the offshore-acquired t12 (offshore) is calculated by subtracting t21 from [t12+t21], using only data obtained at the land station M1. Thus, another reciprocal travel time pair (t12(offshore), t21) is constructed in real time.
In CAT subsurface systems operation, travel-time data are generally stored in individual subsurface stations, and data analyses are performed after the recovery of subsurface systems. Such a delayed data acquisition is insufficient to realize the daily prediction of coastal environment variations. The shoreward transfer of subsurface CAT data enables a monitoring of offshore environments from the shore and make a real-time prediction of offshore environmental changes possible, similarly to radar data in the daily weather prediction.
An outline of CAT with mirror-transpond functionality (MCAT) is given here to stimulate a better understanding for marine policy makers, marine engineers and environmentalists who are interested in the conservation and management of coastal environments. A minimum component of MCAT is a reciprocal sound transmission between one land station (M1) and one offshore station (M2). Original sound transmission and reception are performed between M1 and M2 to construct a pair of reciprocal travel times (t12, t21), for which the travel time difference and travel time summation are proportional to range-average current and sound speed (mainly temperature), respectively. However, t12 is the data obtained at the offshore station M2 and then, cannot be used as real time data. Note that in the subscripts for the travel times, the first and second numbers show the number of the transmit and reception stations, respectively. The original data are stored in the mirror recorder of the MCAT system and the mirror-recorded data are used to execute a subsequent mirror transmission. Two-way non‑separable travel times [t12+t21] and [t21+t12] are constructed by a sequence of original-mirror transmissions, M1🡪M2🡪M1 and M2🡪M1🡪M2, respectively. As a result, t21 and [t12+t21] are obtained at land station M1, and the offshore-acquired t12 (offshore) is calculated by subtracting t21 from [t12+t21], using only data obtained at the land station M1. Thus, another reciprocal travel time pair (t12(offshore), t21) is constructed in real time.
3. System design
CAT/MCAT systems are composed of system controller, acoustic transducer and
power batteries. For DR-type, the system controller and batteries are stored inside the plastic box and connected each other to execute sound transmission. GPS and Bluetooth signals coming from outer devices can be received by antennas put inside the closed box.
The acoustic transducer is placed in sea water with a cable connection to the system controller on land. For SC-type, the system controller and battery cells are stored inside the glass sphere. After the chip-scale atomic clock (CSAC) is synchronized with GPS signals prior, the glass sphere is dropped in sea water. After that, sound transmission and reception are performed at a timing synchronized with CSAC.
CAT/MCAT systems are composed of system controller, acoustic transducer and
power batteries. For DR-type, the system controller and batteries are stored inside the plastic box and connected each other to execute sound transmission. GPS and Bluetooth signals coming from outer devices can be received by antennas put inside the closed box.
The acoustic transducer is placed in sea water with a cable connection to the system controller on land. For SC-type, the system controller and battery cells are stored inside the glass sphere. After the chip-scale atomic clock (CSAC) is synchronized with GPS signals prior, the glass sphere is dropped in sea water. After that, sound transmission and reception are performed at a timing synchronized with CSAC.

4. Field applications
・2D/3D mapping of coastal-sea tidal and residual current fields
・Coastal-sea environment assessments
・Long-term monitoring of global warming in the coastal seas
・Realtime monitoring and prediction of temperature variations in/around aquaculture farms
・Tsunami monitoring by the CAT-based early warning system
・Tidal energy resources survey in the archipelago with strong tidal currents
・Measuring inner-bay circulation and water exchange with outer bay
・Measuring the spreading of river plumes in a bay with a river discharge
・Realtime monitoring and prediction of strait throughflow
・Realtime monitoring and prediction of circulation in the lake/reservoir
・Network monitoring and prediction of river floods caused by heavy rain
・2D/3D mapping of coastal-sea tidal and residual current fields
・Coastal-sea environment assessments
・Long-term monitoring of global warming in the coastal seas
・Realtime monitoring and prediction of temperature variations in/around aquaculture farms
・Tsunami monitoring by the CAT-based early warning system
・Tidal energy resources survey in the archipelago with strong tidal currents
・Measuring inner-bay circulation and water exchange with outer bay
・Measuring the spreading of river plumes in a bay with a river discharge
・Realtime monitoring and prediction of strait throughflow
・Realtime monitoring and prediction of circulation in the lake/reservoir
・Network monitoring and prediction of river floods caused by heavy rain
© 2020 AEM, LLP., All Rights Reserved.
